안드로이드 스튜디오(Android Studio)에서 모듈간 AIDL 통신을 하는 예제 코드입니다. 기존에 Eclipse에서 프로젝트간 AIDL 통신을 할 때에 비해 약간의 차이점이 있긴 했습니다. (예를 들어 Android Studio에서는 aidl 전용 폴더를 만들어서 따로 관리한다던지 등)
여기서는 화면이 존재하지 않는 서비스(Service) 모듈과 별도의 어플리케이션간 AIDL 통신을 하는 코드를 다뤄 보겠습니다.
3개의 모듈 생성
먼저 안드로이드 스튜디오에서 3개의 모듈을 생성합니다. 각각의 모듈의 역할은 다음과 같습니다.
- app : 실제 Activity 등이 있는 어플리케이션
- sdk : AIDL 통신을 쉽게 할 수 있도록 도와주는 라이브러리
- service : GUI가 존재하지 않는 서비스
여기서 sdk 모듈은 따로 존재하지 않아도 됩니다. 하지만, AIDL 통신 부분은 처음 접하는 사람들에게는 다소 어려움이 존재하기 때문에 AIDL을 전혀 모르는 사람들도 쉽게 사용할 수 있도록 Wrapper 클래스화 시키는 것이 좋은 것 같습니다.
종속성 설정
각 모듈간 종속성은 다음과 같습니다.
app 모듈은 sdk 모듈을 참조합니다.service 모듈은 sdk 모듈을 참조합니다.
즉, app 모듈과 service 모듈의 build.gradle 파일에 다음 코드를 추가해줍니다.
dependencies {
...
compile project(':snowsdk');
}
AIDL 파일 생성
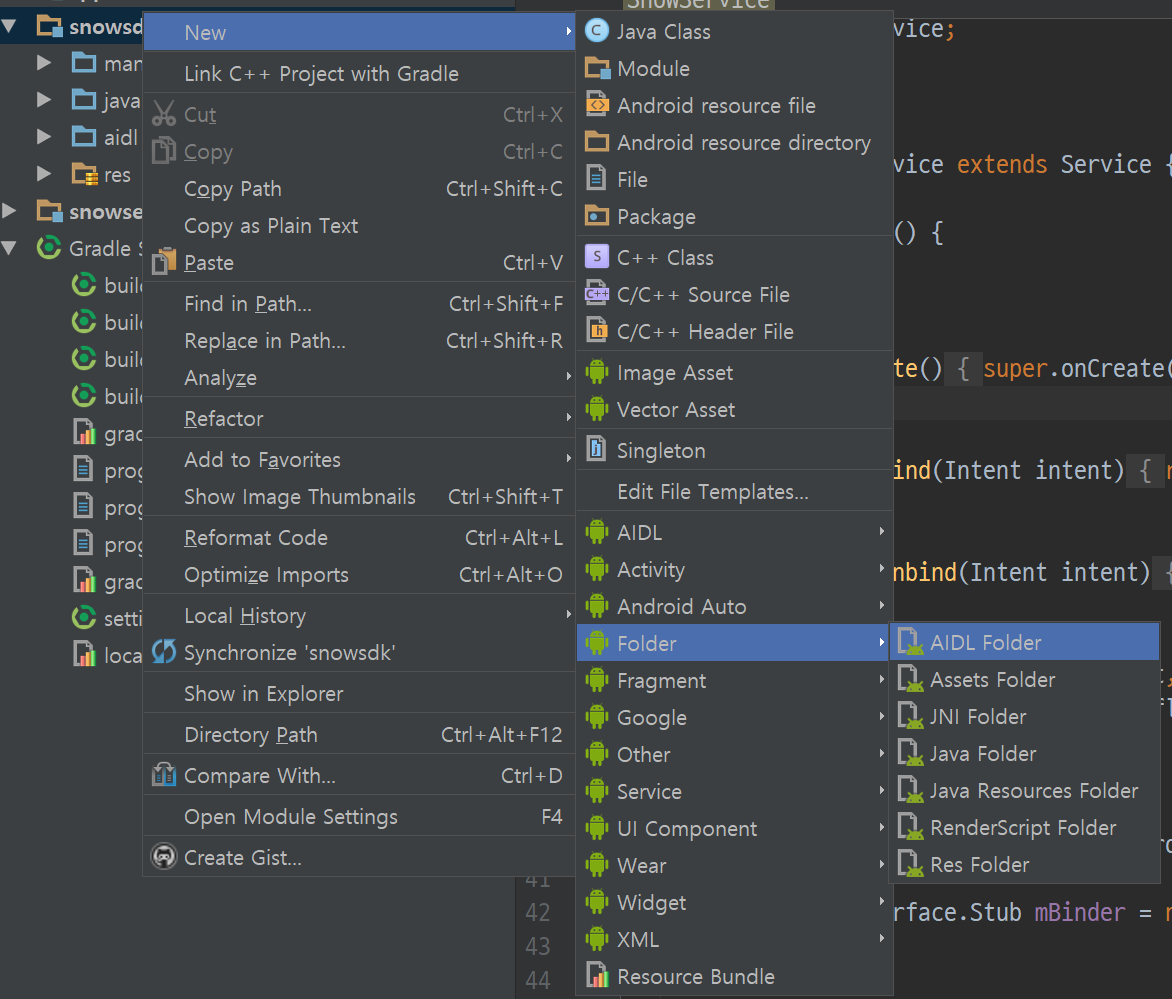
sdk 모듈의 New 메뉴에서 ‘Folder > AIDL’을 선택하면 AIDL 폴더가 만들어집니다.
그리고 그 안에 패키지 이름까지 지정해서 하위 폴더를 만듭니다.
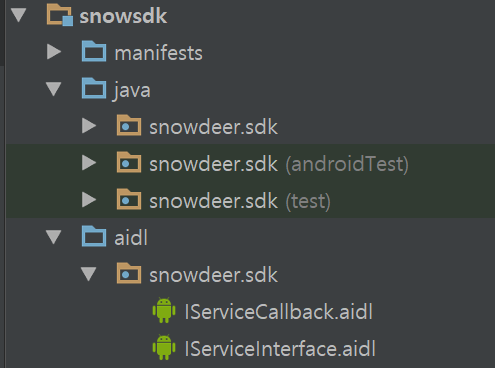
다음은 예제로 만들어 본 aidl 파일입니다. 어플리케이션에서 서비스로 메세지를 전송하는 IServiceInterface.aidl과 그 반대 방향으로 콜백(Callback) 이벤트를 알려주는 용도의 IServiceCallback.aidl 파일 2개를 만들었습니다.
IServiceInterface.aidl
package snowdeer.sdk;
import snowdeer.sdk.IServiceCallback;
interface IServiceInterface {
boolean registerCallback(in IServiceCallback cb);
boolean unregisterCallback(in IServiceCallback cb);
void sendMessage(int what, in Bundle bundle);
}
IServiceCallback.aidl
package snowdeer.sdk;
oneway interface IServiceCallback {
void onMessageReceived(int what, in Bundle bundle);
}
Message 상수값 정의
굳이 이벤트 메세지의 상수값을 정의할 필요없이 필요한 API 개수만큼 aidl 코드안에 정의하는 편이 더 좋을 때도 있습니다.
다만, API를 앞으로 빈번하게 수정해야 할 경우가 있다면 메세지 상수값을 정의해놓고 향후 상수값만 추가하면서 업데이트해나가는 편이 더 수월하더군요.
SNOW_EVENT_MESSAGE.java
package snowdeer.sdk.constant;
public class SNOW_EVENT_MESSAGE {
public static final int SAY_HELLO = 101;
public static final int SAY_GOOD_BYE= 102;
}
SNOW_RESPONSE_MESSAGE.java
package snowdeer.sdk.constant;
public class SNOW_RESPONSE_MESSAGE {
// TODO
}
Java 소스 구현
이제 위에서 만든 aidl 파일들을 이용해서 쉽게 통신할 수 있도록 인터페이스를 만들도록 합니다.
가급적 클래스(class)가 아닌 인터페이스(interface)를 사용하는 편이 더 좋기 때문에 인터페이스로 만들도록 하겠습니다.
SnowInterface.java
package snowdeer.sdk;
public interface SnowInterface {
public interface OnEventListener {
void onHelloRequested();
}
public void setOnEventListener(OnEventListener listener);
void hello();
void goodBye();
}
SnowInterfaceImpl.java
package snowdeer.sdk.impl;
import android.os.Bundle;
import android.os.RemoteException;
import android.util.Log;
import snowdeer.sdk.IServiceCallback;
import snowdeer.sdk.IServiceInterface;
import snowdeer.sdk.SnowInterface;
import snowdeer.sdk.constant.SNOW_EVENT_MESSAGE;
public class SnowInterfaceImpl implements SnowInterface {
OnEventListener mOnEventListener;
IServiceInterface mServiceInterface;
public void setOnEventListener(OnEventListener listener) {
mOnEventListener = listener;
}
public SnowInterfaceImpl(IServiceInterface iface) {
mServiceInterface = iface;
}
public IServiceCallback getServiceCallback() {
return mServiceCallback;
}
IServiceCallback.Stub mServiceCallback = new IServiceCallback.Stub() {
@Override
public void onMessageReceived(int what, Bundle bundle) throws RemoteException {
switch (what) {
// TODO
}
}
};
@Override
public void hello() {
Log.i("snowdeer", "[snowdeer] Hello!");
try {
Bundle bundle = new Bundle();
mServiceInterface.sendMessage(SNOW_EVENT_MESSAGE.SAY_HELLO, bundle);
} catch (Exception e) {
e.printStackTrace();
}
}
@Override
public void goodBye() {
Log.i("snowdeer", "[snowdeer] Good Bye!");
try {
Bundle bundle = new Bundle();
mServiceInterface.sendMessage(SNOW_EVENT_MESSAGE.SAY_GOOD_BYE, bundle);
} catch (Exception e) {
e.printStackTrace();
}
}
}
ServiceProvider 구현
위에서 SnowInterface.java 와 SnowInterfaceImpl.java 코드를 만들었다면 이 인스턴스를 획득할 수 있는 ServiceProvider가 필요합니다. 아래와 같이 구현할 수 있습니다.
SnowServiceProvider.java
package snowdeer.sdk;
import android.content.Context;
import snowdeer.sdk.impl.SnowServiceProviderImpl;
public final class SnowServiceProvider {
private SnowServiceProvider() {}
public interface OnServiceEventListener {
void onConnected(SnowInterface iface);
void onDisconnected();
}
public void setOnServiceEventListener(OnServiceEventListener listener) {
SnowServiceProviderImpl.setOnServiceEventListener(listener);
}
public static boolean connect(Context context) {
return SnowServiceProviderImpl.connect(context);
}
public static void disconnect(Context context) {
SnowServiceProviderImpl.disconnect(context);
}
}
SnowServiceProviderImpl.java
package snowdeer.sdk.impl;
import android.content.ComponentName;
import android.content.Context;
import android.content.Intent;
import android.content.ServiceConnection;
import android.os.IBinder;
import android.os.RemoteException;
import snowdeer.sdk.IServiceInterface;
import snowdeer.sdk.SnowServiceProvider.OnServiceEventListener;
public class SnowServiceProviderImpl {
static final String SERVICE_NAME = "snowdeer.service";
static final String PACKAGE_NAME = "snowdeer.service";
static IServiceInterface mIServiceInterface;
static OnServiceEventListener mOnServiceEventListener;
static SnowInterfaceImpl mServiceInterfaceImpl;
static boolean isConnected = false;
public static void setOnServiceEventListener(OnServiceEventListener listener) {
mOnServiceEventListener = listener;
}
public static boolean connect(Context context) {
if(isConnected) return false;
Intent intent = new Intent(SERVICE_NAME);
intent.setPackage(PACKAGE_NAME);
return context.bindService(intent, mServiceConnection, Context.BIND_AUTO_CREATE);
}
public static void disconnect(Context context) {
if(!isConnected) return;
if(mServiceConnection != null) {
context.unbindService(mServiceConnection);
}
isConnected = false;
if(mOnServiceEventListener != null) {
mOnServiceEventListener.onDisconnected();
}
}
static final ServiceConnection mServiceConnection = new ServiceConnection() {
@Override
public void onServiceConnected(ComponentName name, IBinder service) {
mIServiceInterface = IServiceInterface.Stub.asInterface(service);
if(mServiceInterfaceImpl == null) {
mServiceInterfaceImpl = new SnowInterfaceImpl(mIServiceInterface);
}
try {
mIServiceInterface.registerCallback(mServiceInterfaceImpl.getServiceCallback());
}
catch (RemoteException e) {
e.printStackTrace();
return;
}
if(mOnServiceEventListener != null) {
mOnServiceEventListener.onConnected(mServiceInterfaceImpl);
}
}
@Override
public void onServiceDisconnected(ComponentName name) {
try {
mIServiceInterface.unregisterCallback(mServiceInterfaceImpl.getServiceCallback());
}
catch (RemoteException e) {
e.printStackTrace();
}
if(mOnServiceEventListener != null) {
mOnServiceEventListener.onDisconnected();
}
mServiceInterfaceImpl = null;
mIServiceInterface = null;
isConnected = false;
}
};
}
이제 SDK 쪽은 끝이 났습니다. AIDL 통신을 하는 서비스 쪽 코드를 살펴보도록 하겠습니다.
서비스 구현
AndroidManifest.xml
<?xml version="1.0" encoding="utf-8"?>
<manifest xmlns:android="http://schemas.android.com/apk/res/android"
package="snowdeer.service">
<application
android:allowBackup="true"
android:icon="@mipmap/ic_launcher"
android:label="@string/app_name"
android:roundIcon="@mipmap/ic_launcher_round"
android:supportsRtl="true"
android:theme="@style/AppTheme">
<service
android:enabled="true"
android:exported="true"
android:name=".SnowService">
<intent-filter>
<action android:name="snowdeer.service" />
<category android:name="android.intent.category.DEFAULT" />
</intent-filter>
</service>
</application>
</manifest>
SnowService.java
package snowdeer.service;
import android.app.Service;
import android.content.Intent;
import android.os.Bundle;
import android.os.IBinder;
import android.os.RemoteException;
import android.support.annotation.IntDef;
import snowdeer.sdk.IServiceCallback;
import snowdeer.sdk.IServiceInterface;
public class SnowService extends Service {
public SnowService() {
}
@Override
public void onCreate() {
super.onCreate();
}
@Override
public IBinder onBind(Intent intent) {
return mBinder;
}
@Override
public boolean onUnbind(Intent intent) {
return super.onUnbind(intent);
}
@Override
public int onStartCommand(Intent intent, int flags, int startId) {
return super.onStartCommand(intent, flags, startId);
}
@Override
public void onDestroy() {
super.onDestroy();
}
final IServiceInterface.Stub mBinder = new IServiceInterface.Stub() {
@Override
public boolean registerCallback(IServiceCallback cb) throws RemoteException {
return EventCallbackHandler.getInstance().registerCallback(cb);
}
@Override
public boolean unregisterCallback(IServiceCallback cb) throws RemoteException {
return EventCallbackHandler.getInstance().unregisterCallback(cb);
}
@Override
public void sendMessage(int what, Bundle bundle) throws RemoteException {
switch (what) {
// TODO
}
}
};
}
EventCallbackHandler.java
package snowdeer.service;
import android.os.Bundle;
import android.os.RemoteCallbackList;
import snowdeer.sdk.IServiceCallback;
public class EventCallbackHandler {
static EventCallbackHandler mInstance = new EventCallbackHandler();
private EventCallbackHandler() {}
public static EventCallbackHandler getInstance() {
return mInstance;
}
final RemoteCallbackList<IServiceCallback> mIServiceCallbackList = new RemoteCallbackList<>();
public boolean registerCallback(IServiceCallback cb) {
return mIServiceCallbackList.register(cb);
}
public boolean unregisterCallback(IServiceCallback cb) {
return mIServiceCallbackList.unregister(cb);
}
public void sendCallbackEvent(int what, Bundle bundle) {
int receiverCount = mIServiceCallbackList.beginBroadcast();
for (int i = 0; i < receiverCount; i++) {
try {
IServiceCallback cb = mIServiceCallbackList.getBroadcastItem(i);
cb.onMessageReceived(what, bundle);
} catch (Exception e) {
e.printStackTrace();
}
}
mIServiceCallbackList.finishBroadcast();
}
}