Keras - 수치 예측하기 예제
12 Jan 2018 | 머신러닝 Python KerasKeras를 이용한 수치 예측하기 예제
다음과 같은 랜덤 데이터셋을 만들었을 때, 그 데이터를 학습한 다음 향후 들어오는 입력값을 예측하는 예제코드입니다.
import numpy as np x_train = np.random.random((1000, 1)) y_train = x_train * 2 + np.random.random((1000, 1)) / 3.0 x_test = np.random.random((100, 1)) y_test = x_test * 2 + np.random.random((100, 1)) / 3.0 import matplotlib.pyplot as plt plt.plot(x_train, y_train, 'ro') plt.plot(x_test, y_test, 'bo') plt.legend(['train', 'test'], loc='upper left') plt.show()
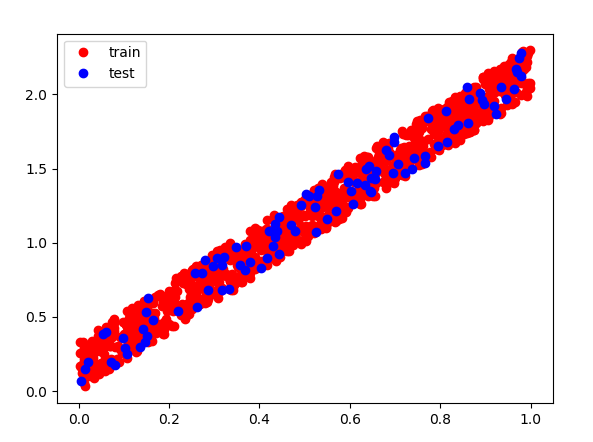
입력값 X에 2를 곱해서 Y 값을 만들어내는 식이기 때문에 `Y = w * X + b’ 형태의 수식으로 표현할 수 있으며, w는 2에 가깝고, b는 0.16에 가까워지면 정답에 근접해집니다.
일반적인 선형회귀 모델(numpy 활용)
import numpy as np
from sklearn.metrics import mean_squared_error
x_train = np.random.random((1000, 1))
y_train = x_train * 2 + np.random.random((1000, 1)) / 3.0
x_test = np.random.random((100, 1))
y_test = x_test * 2 + np.random.random((100, 1)) / 3.0
x_train = x_train.reshape(1000, )
y_train = y_train.reshape(1000, )
x_test = x_test.reshape(100, )
y_test = y_test.reshape(100, )
w = np.cov(x_train, y_train, bias=1)[0, 1] / np.var(x_train)
b = np.average(y_train) - w * np.average(x_train)
print('w:{0}, b:{1}'.format(w, b))
y_predict = w * x_test + b
mse = mean_squared_error(y_test, y_predict)
print('mse: {}'.format(mse))
퍼셉트론 신경망 모델
import numpy as np
from keras.models import Sequential
from keras.layers import Dense
x_train = np.random.random((1000, 1))
y_train = x_train * 2 + np.random.random((1000, 1)) / 3.0
x_test = np.random.random((100, 1))
y_test = x_test * 2 + np.random.random((100, 1)) / 3.0
model = Sequential()
model.add(Dense(1, input_dim=1))
model.compile(optimizer='rmsprop', loss='mse')
hist = model.fit(x_train, y_train, epochs=50, batch_size=10)
w, b = model.get_weights()
print('w:{0}, b:{1}'.format(w, b))
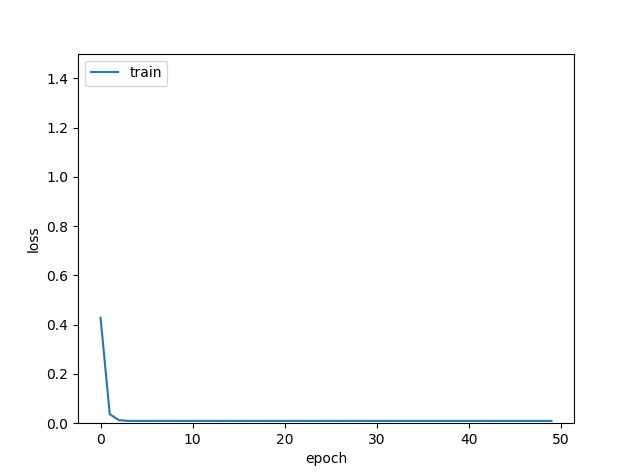
import matplotlib.pyplot as plt
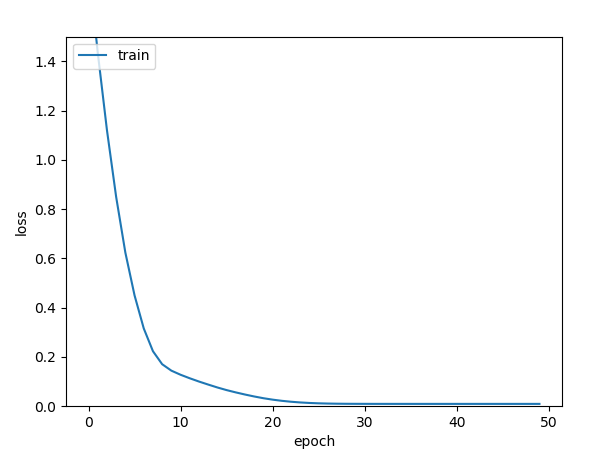
plt.plot(hist.history['loss'])
plt.ylim(0.0, 1.5)
plt.xlabel('epoch')
plt.ylabel('loss')
plt.legend(['train'], loc='upper left')
plt.show()
loss = model.evaluate(x_test, y_test, batch_size=10)
print('loss: {0}'.format(loss))
결과는 다음과 같습니다.
w:[[2.009994]], b:[0.16119921]
...
loss: 0.010309214843437076
다층 퍼셉트론 신경망 모델
import numpy as np
from keras.models import Sequential
from keras.layers import Dense
x_train = np.random.random((1000, 1))
y_train = x_train * 2 + np.random.random((1000, 1)) / 3.0
x_test = np.random.random((100, 1))
y_test = x_test * 2 + np.random.random((100, 1)) / 3.0
model = Sequential()
model.add(Dense(64, input_dim=1, activation='relu'))
model.add(Dense(1))
model.compile(optimizer='rmsprop', loss='mse')
hist = model.fit(x_train, y_train, epochs=50, batch_size=10)
import matplotlib.pyplot as plt
plt.plot(hist.history['loss'])
plt.ylim(0.0, 1.5)
plt.xlabel('epoch')
plt.ylabel('loss')
plt.legend(['train'], loc='upper left')
plt.show()
loss = model.evaluate(x_test, y_test, batch_size=10)
print('loss: {0}'.format(loss))
결과입니다.
...
loss: 0.008995027653872967