블록체인 소개 - (3) 블록체인 활용 사례
07 Jan 2018 | BlockChain블록체인 활용 사례
블록체인을 실제로 업무에 활용하거나 서비스에 적용한 사례는 꽤 많이 있습니다.
암호 화페(Cryptocurrency)
블록체인의 대표적인 예시가 ‘비트코인’입니다. 그 외에도 이더리움이나 기타 수많은 암호 화폐들이 존재합니다. 이 부분은 현재 엄청난 사회적 이슈가 되어 수많은 논의가 이루어지고 있는데, 이번 포스팅에서는 암호 화폐에 대한 부분은 패스하도록 하겠습니다.
송금 서비스
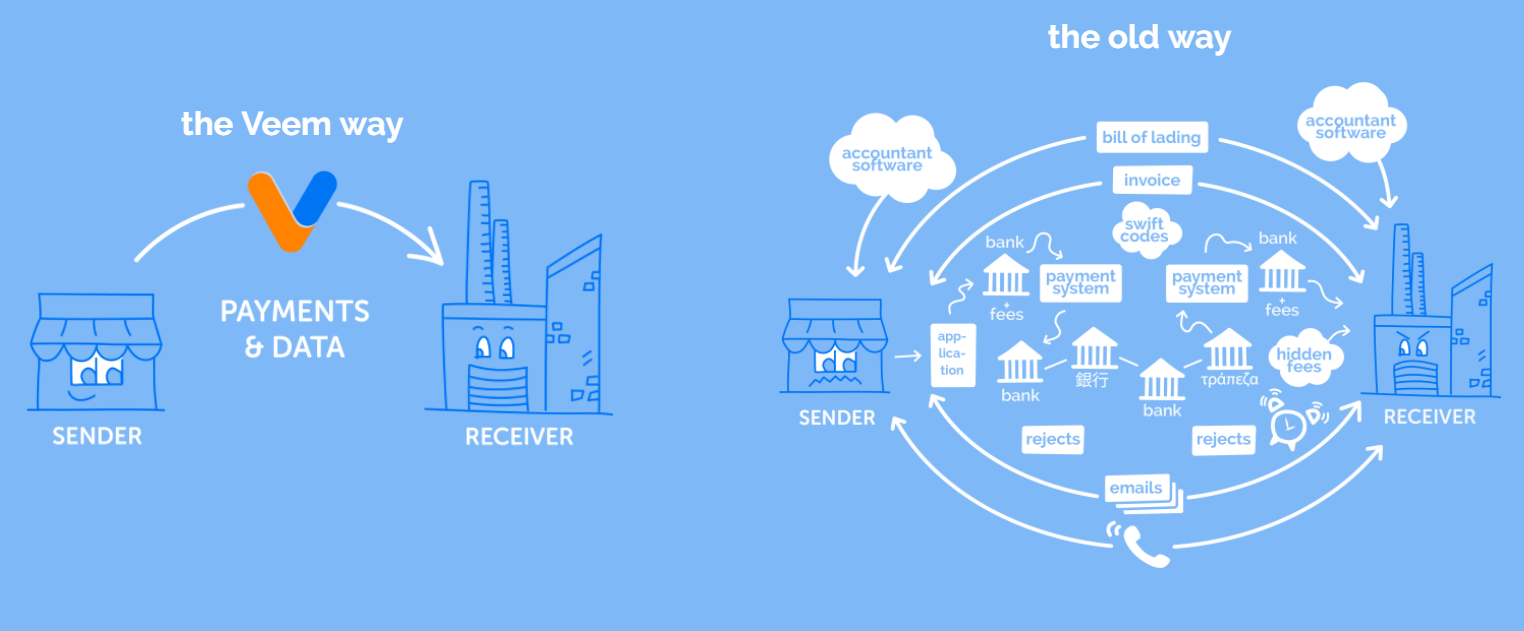
송금 중에서도 특히 국제 송금은 상당히 느리고 많은 수수료를 필요로 합니다. 또한 블랙박스 형태로 처리되기 때문에 송금하는 사람과 받는 사람 모두 처리 상태를 알 수 없는 불편함이 존재했습니다. 블록체인을 이용하면 보다 간편하고 빠르게, 저렴한 수수료로 송금 서비스를 제공할 수 있습니다. 다만, 실제 화폐와 블록체인 기반의 가상 화폐와의 환전을 위한 중개소가 필요하며, 세계 각국에 그런 환전소가 안정적으로 유지되어야 할 필요가 있습니다.
미국 Align Commerce사는 블록체인을 이용해서 국제 송금 서비스를 제공하고 있습니다. 2016년 6월 기준으로 60개국에 서비스를 제공하고 있습니다.
무역 금융
무역은 운송에 많은 시간이 걸리며, 그로 인해 상품의 인도와 대금 결제간의 시차가 크게 발생하는 경우가 많습니다. 또한 여러 관계자가 엮이기 때문에 거래가 복잡한 문제가 있습니다. 그래서 리스크 관리를 위해 신용장을 메일이나 우편 등으로 발행하고 있습니다.
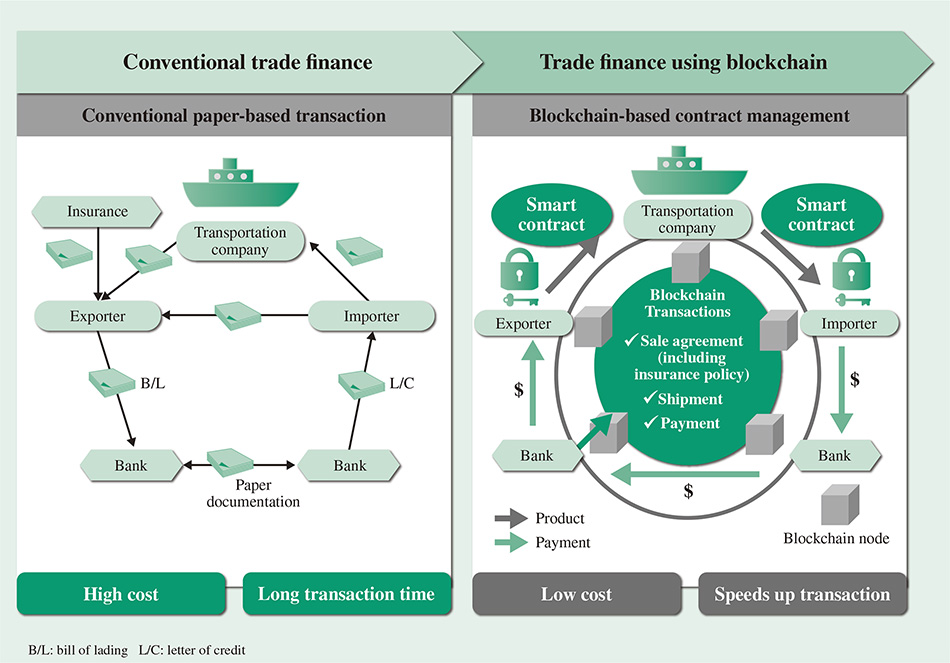
일본의 오릭스 은행, NTT 도코모 벤처스, 시즈오카 은행 등에서는 신용장 거래에 블록체인 기술을 적용하는 실증 실험을 완료한 적이 있으며, Bank of America, HSBC 홀디딩스 등에서도 블록체인 기반 신용장 거래를 검증 완료했습니다. 또한 글로벌 금융 기관의 컨소시움인 R3CEV에서도 신용장과 미수금 청구서 관리를 위해 블록체인 기술을 적용한 사례 등이 있습니다.
크라우드 펀딩(Crowd Funding)
코인을 이용한 자금 조달 방식(ICO, Initial Coin Offering)으로 역시나 현재 엄청난 사회적 이슈가 되고 있는 부분입니다. 현재 수많은 사례들이 있으며, 여기서는 일단 패스하도록 하겠습니다.
마켓 플레이스
중고나라와 같은 중고 거래, 지마켓, 옥션 등의 상품 거래 등에도 블록체인을 적용할 수는 있습니다. 하지만, 블록체인은 블록체인 외부의 상품에 대해서는 어떻게 할 수가 없습니다. 예를 들어 중고나라에서 블록체인을 이용해 입금은 했으니, 실제 택배를 받아보니 벽돌이 포장되어서 오는 것은 방지할 수가 없습니다.
하지만, 실물 상품이 아닌 음악이나 영화, 이미지같은 데이터 상품에는 블록체인을 응용하기가 쉽습니다.
예를 들어 멜론과 같은 음악 마켓에서 IU의 노래를 판매한다고 가정합시다. 100명이 구매를 하든, 100,000명이 구매를 하든 IU는 멜론이 알려준 판매량밖에 알지를 못합니다. 즉, 멜론이 자사의 이득을 위해 거짓말을 하더라도 작곡자와 소비자는 자신이 구매한 금액이 작곡자에게 정상적으로 흘러갔는지를 확인할 수가 없습니다.
만약 블록체인 기반의 음악 마켓이 있다면 이런 문제를 해결할 수 있습니다. IU는 블록체인내에 스마트 컨트랙트(Smart Contract)를 이용해서 자신의 노래를 등록하고 적당한 가격을 입력합니다. 그리고 소비자는 블록체인을 통해 노래를 구매하면 자신이 구매한 금액이 작곡자에게 그대로 전달되는 것을 투명하게 확인할 수 있습니다.
그외에도 미디어 스트리밍 종량 과금 모델에 블록체인을 적용할 수 있습니다. 1시간 분량의 시청료를 블록체인에 등록해놓으면 고객은 구매를 해서 사용할 수 있으며, 컨텐츠 시청을 이용하지 못한 경우에 환불 등을 해줄 수 있습니다.
dotBlockchainMedia 등의 회사에서 블록체인 기반 음악 마켓을 운영하고 있으며, Kodak은 블록체인 기반 사진 마켓 시장에 뛰어들었습니다.
전력 시장
개인이 자가발전 등으로 생산한 전기를 주변 마을 사람들에게 블록체인 기반으로 판매를 하는 사례가 있었습니다. 2016년 4월 미국 뉴욕에서 TransActive Grid 프로젝트로 실증 실험을 완료했습니다. 전기 판매 방법은 다음과 같습니다.
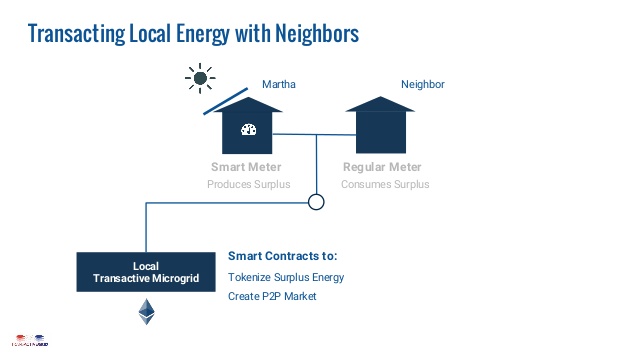
자가발전을 하는 가정에 스마트 계측기를 설치하고, 스마트 계측기는 생산되는 전기량을 블록체인을 기록하며 인근 주민들은 블록체인을 통해 저렴한 가격에 전력을 구매해서 사용합니다. 특별한 중개자 없이 거래가 되어 판매자, 구매자 모두 가격적인 혜택을 누리며 블록체인의 스마트 컨트랙트로 자동으로 계약을 체결해주니 판매자가 크게 신경을 쓰고 있지 않아도 생태계가 유지되어 블록체인의 대표적인 사례 중 하나로 언급되고 있습니다.
저작권 관리 및 문서 공증
작품 정보를 블록체인에 등록을 하면 해당 저작권이 누구에게 귀속되었는지를 쉽게 증명할 수 있습니다. 음악이나 이미지, 예술 작품 등의 디지털 정보를 블록체인에 등록하면 해당 정보는 위변조 될 수 없기 때문에 언제라도 증명이 가능합니다.
미국 Blockai사에서는 블록체인에 저작물을 등록하고, 또한 저작물에 대한 저작권 증명서를 발급해주는 서비스를 제공하고 있습니다. 또한 Copytrack이라는 글로벌 저작권 등록 업체도 최근에 서비스를 시작했습니다.
또한 문서 정보를 블록체인에 기록해서 공증을 대체하기 위한 노력도 진행되고 있습니다. Factom과 같은 전자 문서를 블록체인으로 공증해주는 오픈 플랫폼도 존재합니다.
해시값을 쉽게 추출할 수 있고 블록체인을 이용해서 기록하기만 하면 쉽게 증명이 되는 분야이기 때문에 많은 업체들에서 서비스화가 이루어질 것이 예상되고 있습니다.
고가 물품 거래 추적
다이아몬드와 같은 고가의 물품을 블록체인을 이용해서 등록하고 관리할 수 있습니다. 그래서 물품 거래 관리나 유통 추적을 쉽게 할 수 있습니다.
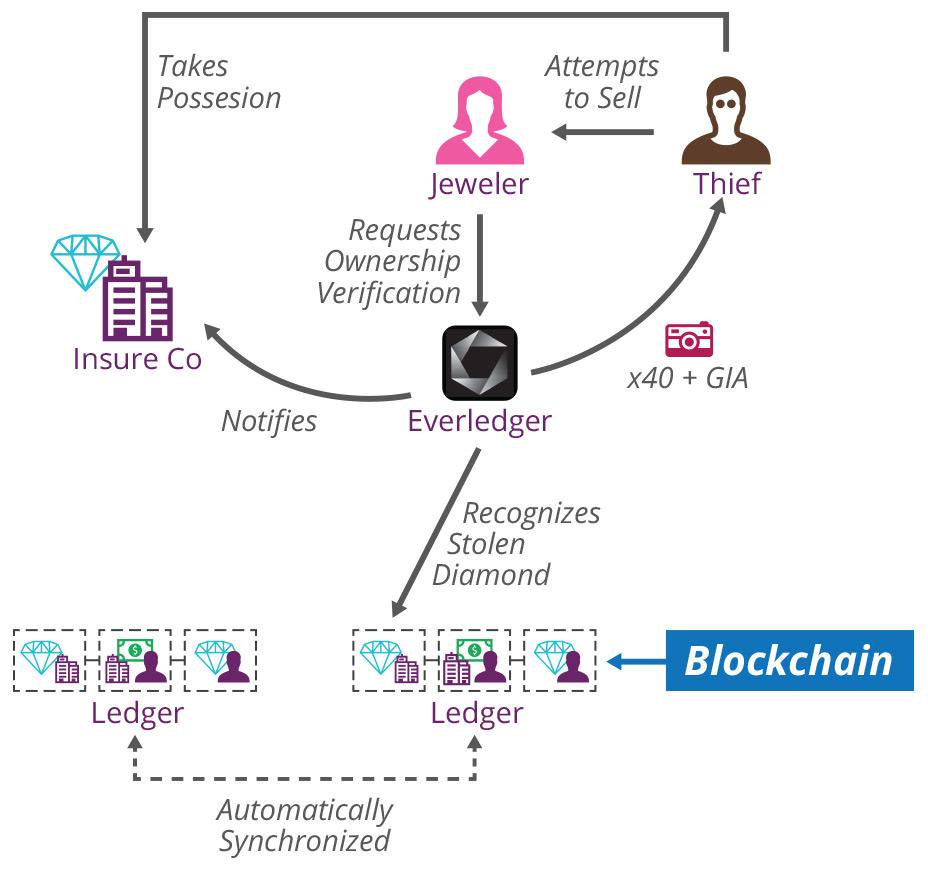
영국의 Everledger사에서는 다이아몬드와 그 소유자 정보, 감정서 등을 블록체인으로 관리하는 서비스를 제공하고 있으며, 2016년 6월 기준으로 85만개 이상의 다이아몬드가 블록체인에 등록이 되었습니다. 다이아몬드가 가진 약 40가지 이상의 특징을 추출하여 블록체인에 등록했으며, 독일의 국제 보험사인 알리안츠사와 제휴하고 있습니다.
IoT 활용
IoT에도 블록체인과 스마트 컨트랙트를 활용하는 연구가 많이 진행되고 있습니다. 엄청나게 많은 수의 IoT 디바이스가 특정 서버에 몰려 과부화 상태가 되는 것을 방지하기 위해 분산 시스템 구조가 많이 연구되고 있으며 블록체인을 이용한 기기 인증 등도 많이 시도되고 있습니다.
일본의 Nayuta사의 경우는 블록체인 기반 IoT 전원 소켓을 공개했습니다. 사용자가 스마트폰을 이용해서 전원 소켓 이용권을 신청하면, 블록체인으로부터 이용권 전자 토큰을 발급받습니다. 이를 이용해서 전원 소켓을 활성화해서 사용할 수 있습니다.

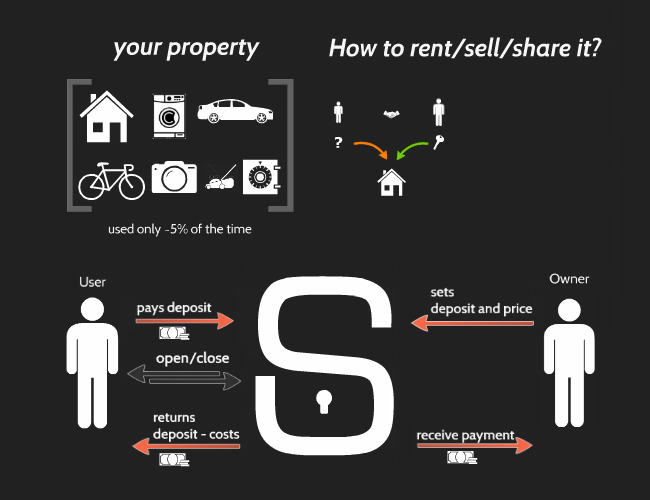
독일 Slock사는 블록체인 기반 집 임대 서비스를 제공하고 있습니다. 사용자가 블록체인을 통해 임대료의 2배의 금액을 보증금으로 제출한다음 스마트폰을 이용해서 현관 문을 열고 집안의 다양한 서비스를 이용합니다. 그리고 이용이 끝나면 블록체인의 계약 내용과 비교하여 남은 금액을 정산해주는 서비스입니다.
투표
블록체인을 투표에 활용하기 위한 연구도 많이 진행되고 있습니다. 블록체인을 활용하면 투표 여부 확인이나 집계의 투명화를 얻을 수 있고, 어떻게 익명성을 유지할 것인가가 과제로 남아 있습니다. 사실 해시함수와 같이 단방향 함수가 많이 있기 때문에 익명성을 보장하면서 유효성을 증명할 수 있는 다양한 방법이 있으리라 예상됩니다.
호주의 정당인 Flux에서는 블록체인을 이용해 당원들에게 투표권 토큰을 발행했었습니다. 또한 투표권은 양도가 가능해서 정치에 관심이 없거나 지식이 없는 사람들은 자신이 믿을 수 있는 사람들에게 토큰을 양도해서 대리 투표도 가능하게 했었습니다.
앞으로 좀 더 많은 연구가 진행되긴 해야겠지만 투표 역시 블록체인을 적용하기에 좋은 분야임은 틀림없는 것 같습니다.